记录PID 控制原理,先引出模拟 PID 控制公式,然后离散化处理,推导出位置式 PID 控制公式,再进一步推导出增量式 PID 控制公式。
1、PID控制简介
PID控制应该算是应用非常广泛的控制算法了。小到控制一个元件的温度,大到控制无人机的飞行姿态和飞行速度等等,都可以使用PID控制。
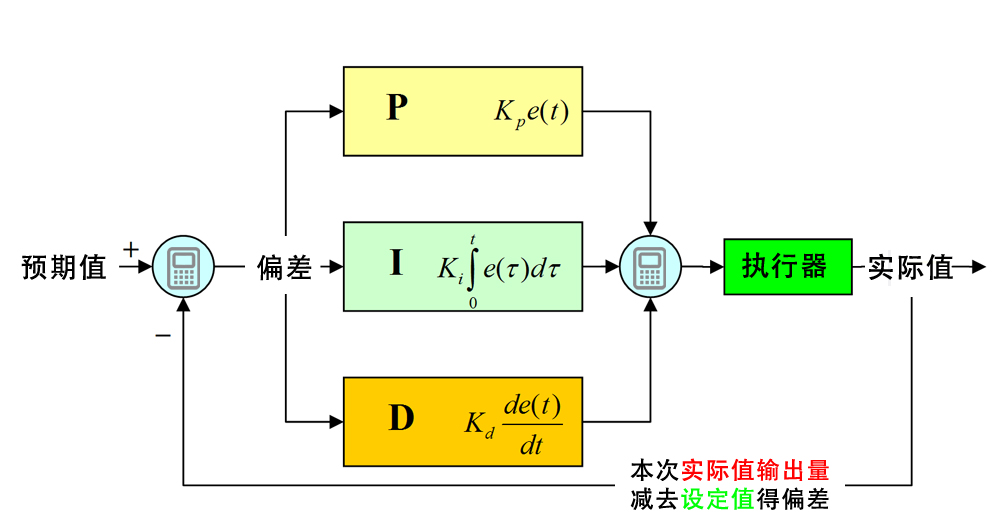
大多数被控对象通常有储能元件存在,这就造成系统对输入作用的响应有一定的惯性。另外,在能量和信息的传输过程中,由于管道和传输等原因会引入一些时间上的滞后,往往会导致系统的响应变差,甚至不稳定。因此,为了改善系统的调节品质,通常在系统中引入偏差的比例调节,以保证系统的快速性。引入偏差的积分调节以提高控制精度,引入偏差的微分调节来消除系统惯性的影响,这就形成了按偏差PID调节的系统,该控制系统如图所示。
2、PID原理
将偏差的比例(Proportion)、积分(Integral)和微分(Differential)通过线性组合构成控制量,用这一控制量对被控对象进行控制,这样的控制器称 PID 控制器。
3、模拟 PID 控制
在模拟控制系统中,控制器最常用的控制规律是 PID 控制,下图所示是一个小功率直流电机的调速框图。

上图中,给定转速 $n_0(t)$ 与实际转速 $n(t)$ 进行比较,其差值 $e(t)=n_0(t)-n(t)$,经过 PID 控制器调整后输出电压控制信号 $u(t)$,$u(t)$ 经过功率放大后,驱动直流电动机改变其转速。
抽象化的模拟 PID 控制系统原理框图,如下图所示。该系统由模拟 PID 控制器和被控对象组成。

图中,$r(t)$ 是给定值,$y(t)$ 是系统的实际输出值,给定值与实际输出值构成控制偏差:
$$e(t)=r(t)-y(t)$$ (式 1-1)
$e(t)$ 作为 PID 控制的输入, 作为 PID 控制器的输出和被控对象的输入。 所以模拟 PID 控制器的
控制规律为
$$u(t)=kp[e(t)+\frac{1}{Ti}\int e(t)dt+Td\frac{de(t)}{dt}]$$ (式 1-2)
其中,$K_p$ 为控制器的比例系数,$T_i$ 为控制器的积分时间,也称积分系数,$T_d$为控制器的微分时间,也称微分系数。
4、数字 PID 控制
由于计算机的出现,计算机进入了控制领域。人们将模拟 PID 控制规律引入到计算机中来。对(式 1-2)的 PID 控制规律进行适当的变换,就可以用软件实现 PID 控制,即数字 PID 控制。
数字式 PID 控制算法可以分为位置式 PID 和增量式 PID 控制算法。
4.1、位置式 PID 算法
由于计算机控制是一种采样控制,它只能根据采样时刻的偏差计算控制量,而不能像模拟控制那样连续输出控制量,进行连续控制。由于这一特点,(式 1-2)中的积分项和微分项不能直接使用,必须进行离散化处理。离散化处理的方法为:以 T 作为采样周期,k 作为采样序号,则离散采样时间 kT对应着连续时间 t,用矩形法数值积分近似代替积分,用一阶后向差分近似代替微分,可作如下近似变换:
$ t\approx kT (k = 0,1,2,…) $
$\int e(t)dt\approx T\sum_{j=0}^{k} e(jT) = T\sum_{j=0}^{k} e_j$
$\frac{de(t)}{dt} \approx \frac{e(kT)-e[(k-1)T]}{T} = \frac{e_k-e_{k-1}}{T}$
上式中,为了表达的方便,将类似于 $e(kT)$ 简化成 $e_k$ 等。
将(式 2-1)代入(式 1-2),就可以得到离散的 PID 表达式为
$$ u_k = Kp[e_k+\frac{(T)}{Ti}\sum_{j=0}^{k}e_j+Td\frac{(e_k-e_{k-1})}{T}]$$ (式 2-2)
或
$$ u_k = Kp*e_k+Ki\sum_{j=0}^{k}e_j+Kd\frac{(e_k-e_{k-1})}{T}$$ (式 2-3)
其中,
$k$ 为 采样序号,k = 0,1,2,…;
$u_k$ 为第 k 次采样时刻的计算机输出值;
$e_k$ 为第 k 次采样时刻输入的偏差值;
$e_{k-1}$ 为第 k-1 次采样时刻输入的偏差值;
$Ki$ 为积分系数,$Ki=kp*\frac{T}{Ti}$;
$Kd$ 为微分系数,$Kd=Kp*\frac{Td}{T}$。
如果采样周期足够小,则 (式 2-2)或(式 2-3)的近似计算可以获得足够精确的结果,离散控制过程与连续过程十分接近。
(式 2-2)或(式 2-3) 表示的控制算法式直接按(式 1 -2) 所给出的 PID 控制规律定义进行计算的,所以它给出了全部控制量的大小,因此被称为全量式或位置式 PID 控制算法。
这种算法的缺点是:由于全量输出,所以每次输出均与过去状态有关,计算时要对 $e_k$ 进行累加,工作量大。并且,因为计算机输出的对应的是执行机构的实际位置,如果计算机出现故障,输出的将大幅度变化,会引起执行机构的大幅度变化,有可能因此造成严重的生产事故,这在实际生产际中是不允许的。
4.2、增量式 PID 算法
所谓增量式 PID 是指数字控制器的输出只是控制量的增量 $\bigtriangleup u_k$ 。 当执行机构需要的控制量是增量,而不是位置量的绝对数值时,可以使用增量式 PID 控制算法进行控制。
增量式 PID 控制算法可以通过(式 2-2)推导出。由(式 2-2)可以得到控制器的第 k-1 个采样时刻的输出值为:
$$ u_(k-1) = Kp[e_(k-1)+\frac{(T)}{Ti}\sum_{j=0}^{k-1}e_j+Td\frac{(e_(k-1)-e_(k-2))}{T}]$$ (式 2-4)
用(式 2-2)减去(式 2-4)相减并整理,就可以得到增量式 PID 控制算法公式:
$$ \bigtriangleup u_k = u_k - u_{k-1} = Kp[e_k-e_{k-1}+\frac{(T)}{Ti}e_k+Td\frac{e_k-2e_{k-1}+e_{k-2}}{T}]$$
$$= Kp(1+\frac{T}{T_i}+\frac{Td}{T})e_k - Kp(1+\frac{2Td}{T})e_{k-1}+Kp\frac{Td}{T}e_{k-2}$$ (式 2-5)
$$=Ae_k+Be_{k-1}+Ce_{k-2}$$
其中,
$A=Kp(1+\frac{T}{T_i}+\frac{Td}{T})$;
$B=Kp(1+\frac{2Td}{T})$;
$C=Kp\frac{Td}{T}$。
由(式 2-5)可以看出,如果计算机控制系统采用恒定的采样周期 T ,一旦确定 A、 B、 C,只要使用前后三次测量的偏差值,就可以由(式 2-5)求出控制量。
增量式 PID 控制算法与位置式 PID 算法(式 2-2)相比,计算量小的多,因此在实际中得到广泛的应用。
而位置式 PID 控制算法也可以通过增量式控制算法推出递推计算公式:
$$u_k=u_{k-1}+\bigtriangleup u_k$$ (式 2-6)
(式 2-6)就是目前在计算机控制中广泛应用的数字递推PID控制算法。
4.3、采样周期的选择
香农(Shannon) 采样定律 :为不失真地复现信号的变化, 采样频率至少应大于或等于连续信号最高频率分量的二倍。根据采样定律可以确定采样周期的上限值。实际采样周期的选择还要受到多方面因素的影响,不同的系统采样周期应根据具体情况来选择。
采样周期的选择,通常按照过程特性与干扰大小适当来选取采样周期:即对于响应快、(如流量、压力) 波动大、易受干扰的过程,应选取较短的采样周期;反之,当过程响应慢(如温度、 成份)、滞后大时,可选取较长的采样周期。
采样周期的选取应与 PID 参数的整定进行综合考虑, 采样周期应远小于过程的扰动信号的周期,在执行器的响应速度比较慢时,过小的采样周期将失去意义,因此可适当选大一点;在计算机运算速度允许的条件下,采样周期短, 则控制品质好;当过程的纯滞后时间较长时, 一般选取采样周期为纯滞后时间的 1/4~1/8。





